
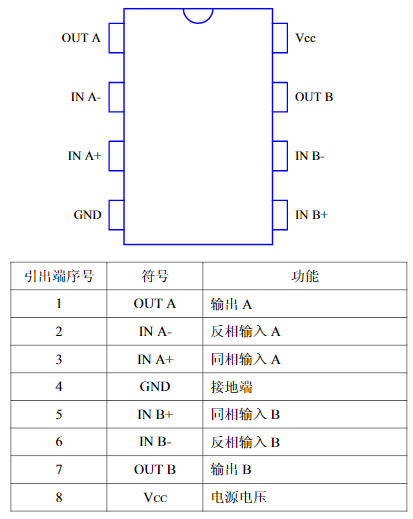
LM393内具有2个独立的高精密度电压比较器,其偏置电压可低至2.0mV。
使用单电源供电,供电压宽。优点是:高精度比较器;可减少温度单的VOS漂移;
不用双电源供电;全部用一致的逻辑格式。
实际应用电路1:CPU供电电源电路(利用比较器在电源出问题时对cpu供电停止)
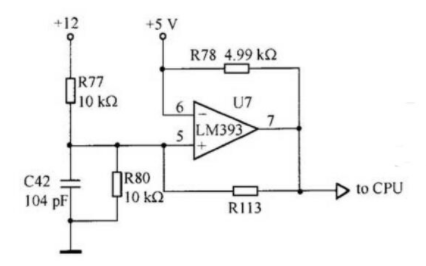
如上图所示,此电路给cpu提供工作电源5V,当控制电源12V/5V发生故障时,CPU将被复位或停止工作。
此电路采用LM393运放作为比较器,由12V直流电源经R77、R80分压后得到约6V的电压,
送至U7的引脚5即运放的同相端,与反相端的5V进行比较。
在正常情况下,运放的输出经R78上拉电阻钳位为5V。
若12V电源因某种原因低于10V或5V电源因某种原因高于5V,则运放的输出会变为低电平,CPU将停止工作。
当CPU第一次收到此电路产生的+5V信号时,处于复位状态,对系统自检。
实际应用电路2:
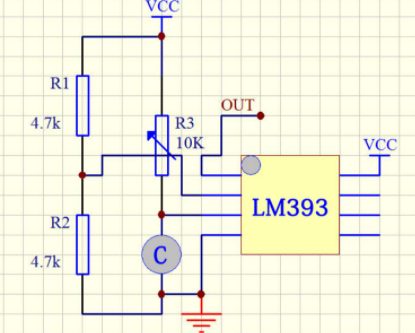
图中C标志为一些传感器,比如红外接收管、光敏等等(可以替换)。
整个电路通过10K滑动电阻R3来改变其灵敏度。OUT引脚输出高低电平,可直接接入单片机。
实际应用电路3:最经典的红外避障模块的制作: #FormatImgID_3#
1.模块描述:
该传感器模块对环境光线适应能力强,其具有一对红外线发射与接收管,
发射管发射出频率的红外线,当检测方向遇到障碍物(反射面)时,红外线反射回来被接收管接收,
经过比较器电路处理之后,绿色指示灯会亮起,同时信号输出接口输出数字信号(一个低电平信号),
可通过电位器旋钮调节检测距离,有效距离范围2~30cm,工作电压为3.3V-5V。
该传感器的探测距离可以通过电位器调节、具有干扰小、便于装配、使用方便等特点,
可以广泛应用于机器人避障、避障小车、流水线计数及黑白线循迹等众多场合。
2.模块参数说明:
(1)当模块检测到前方障碍物信号时,电路板上绿色指示灯点亮电平,同时OUT端口持续输出低电平信号,
该模块检测距离2~30cm,检测角度35°,检测距离可以通过电位器进行调节,顺时针调电位器,检测距离增加;逆时针调电位器,检测距离减少;
(2)传感器主动红外线反射探测,因此目标的反射率和形状是探测距离的关键。其中黑色探测距离小,白色大;小面积物体距离小,大面积距离大;
(3)传感器模块输出端口OUT可直接与单片机IO口连接即可,也可以直接驱动一个5V继电器;连接方式:VCC-VCC;GND-GND;OUT-IO;
(4)比较器采用LM393,工作稳定;
(5)可采用3-5V直流电源对模块进行供电。当电源接通时,红色电源指示灯点亮;
(6)具有3mm的螺丝孔,便于固定、安装;
(7)电路板尺寸:3.2CM*1.4CM;
3.模块接口说明
(1)VCC外接3.3V-5V电压(可以直接与5v单片机和3.3v单片机相连);
(2)GND外接GND;
(3)OUT小板数字量输出接口(0和1);
(4)工作电流是10ma以内;
如图2所示壁障传感器模块

下载地址

特别说明:

感谢您的支持,我会继续努力的!


打开支付宝扫一扫,即可进行扫码打赏哦
资源分享不易,你的支持,将会是我继续前行的动力!!!








